
- 01 September, 2024
 Foreign Affairs, Geopolitics & National Security
Foreign Affairs, Geopolitics & National SecurityAutonomous Copters : Full-Scale Autonomy In Rotary Wing Operations
Brig Arvind Dhananjayan (Retd)
Mon, 07 Mar 2022
| Reading Time: 8 minutes
08 February 2022. The US Defence Advanced Research Projects Agency (DARPA) announced the first unmanned flight of a Black Hawk helicopter fitted with DARPA’s Aircrew Labour In-Cockpit Automation System (ALIAS). This was the first unmanned flight of a full-scale rotary-wing aircraft.
The demonstrated autonomous guidance-and-flight-control system (GFCS) was integrated on a Black Hawk helicopter as part of the effort towards building a fleet of all-weather, operationally capable rotary-wing platforms. The GFCS components were first flight-tested on a manned platform before being adapted onto the test helicopter to demonstrate unmanned flight. Lockheed Martin (LM) envisions use of ruggedized (hardened) Tablet technologies to operate such unmanned/ optionally piloted platforms autonomously for the US Army, with enhanced safety mechanisms, thus obviating manned operations.
Autonomous flight operations have till now been mostly restricted to Unmanned Aerial Systems (UAS), either in independent flight or as an unmanned wingman to a manned aircraft under the Manned-Unmanned Teaming (MUMT) Concept (read more about MUMT@ https://chanakyaforum.com/the-unmanned-wingman/). However, unmanned flight of hitherto fore manned systems remains a niche concept that is still evolving.

A UH-60A Black Hawk helicopter flying unmanned with the ALIAS System: Source-breakingdefense.com/ DARPA
The concept of Unmanned Air Mobility (UAM) is not immediately current. NASA has been experimenting with UAM technology since 2019. The following is quoted from the paper on NASA UAM discussions- “with an impending pilot shortage… and a need for scalability and efficiency to reduce cost, future…aviation operations are envisioned to take advantage of continuing advances in machine intelligence, data analytics, high-bandwidth and secure data networks, and increasingly capable sensors”. The flowchart below embodies NASA’s approach to progress from present manned helicopter operations towards truly autonomous unmanned flight:-
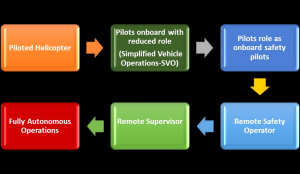
In this example, UAM could progress forward from existing piloted helicopter operations by introducing Simplified Vehicle Operations (SVO), where aircraft are provided with enhanced automation functions, thus reducing workload and training needs. Automation would subsequently expand to operations with an onboard pilot to provide trained intervention during unforeseen events/emergencies. The next proposed step is to remove the pilot from the helicopter and engage them as ‘Remote Safety Operators’ (RSO), responsible to ensure aircraft safety from the ground, with adequate control and monitoring wherewithal at their disposal. In this state, the RSO would be responsible for the flight operations of a single aircraft. The helicopter would operate largely autonomously, receiving safety guidance/ commands from the RSO. This is then proposed to graduate to enhanced RSO capability, with a single RSO controlling and later only supervising the flight operations of multiple helicopters. The final step would be a fully autonomous vehicle where the entire flight would be managed by an onboard autonomous system. While the paper is oriented towards civil aviation operations, most aspects can be readily adapted to military contexts.
The above-mentioned unmanned Black Hawk flight from the 160th Special Operations Aviation Regiment, at Fort Campbell, Kentucky, was unique in the fact that while there exist specifically constructed scaled-down models of unmanned aerial platforms which perform unmanned flights with a limited degree of autonomy, this is the first unmanned flight of a fully operational hitherto fore manned flying platform.

Screen Grab of Obstacle Avoidance Scenario Executed by the Black Hawk Helicopter: Source- Video from LM (YouTube)
According to DARPA, Tablet Control, as mentioned in the beginning of this article, was developed as part of the ALIAS Project and also enjoys the moniker of the ‘click and fly’ system (CFS). The tablet has touch/voice interface capabilities and is specially designed to leverage the existing autonomous systems of the helicopter. The modus operandi is to input fundamental flight commands, which the CFS interpolates for minute flight control parameters. The CFS has been made possible by the existing ‘fly-by-wire’ (FBW) technology, which translates the external pilot’s commands into digital inputs and further into mechanical operations executed on the flight control system. The CFS can also readily incorporate systems like the Terrain Awareness and Warning System (TAWS). TAWS uses GPS signals to determine the aircraft’s position/future course and then compares this flight path with an existing terrain database, to obviate emergencies like Controlled Flight Into Terrain (CFIT), the chief cause of the tragedy surrounding the helicopter crash of the Indian Chief of Defence Staff, General Bipin Rawat, in December last year.
The ALIAS Program was earlier showcased last year when a UH-60 Black Hawk successfully completed an autonomous resupply mission, but with safety pilots onboard. This was achieved under Project Convergence- a US Joint-Force program spearheaded by the US Army Futures Command for seamless all-Service, all-domain functionality as a contributor towards Joint All Domain Command and Control (JADC2). Read about the contours of JADC2 @ https://chanakyaforum.com/jadc2-spearheading-all-domain-operations/.
Post the above, several trial flights were subsequently flown with safety pilots on-board, before the February 2022 unmanned flight of the Black Hawk on a 30-minute undulating pre-programmed run that simulated negotiation of the Manhattan skyline, thus demonstrating the versatility of ALIAS to undertake varying flight patterns with obstacle avoidance- an essential prerequisite for combat helicopter flying!
DARPA, this month, plans the first fly-by-wire sortie with an ALIAS-equipped M-model Black Hawk – a helicopter equipped with the most modern instrumentation and flight control systems in the world today.
What Are the Contours of the ALIAS Program?
The ALIAS Program is thought to have been preceded by the Autonomous Aerial Cargo/Utility System (AACUS) program, first demonstrated in 2014 with the aim to enable autonomous control and flight of utility helicopters for the US Marine Corps. The AACUS Program was initiated based on operational experience in Iraq and Afghanistan and envisaged operations wherein an unmanned helicopter ‘picks out the optimal route and best landing site closest to the war fighters, executes the flight path including carrying out obstacle avoidance, lands and returns to base once the resupply is complete-all with the single touch of a handheld tablet’! AACUS completed its first closed-loop mission from take-off to landing for actual cargo resupply in May 2018.


A Huey Cobra with AACUS completes a Trial Flight in December 2017:Source- defense-update.com
ALIAS began as a ‘co-piloting’ program, to enhance pilot efficiency by aiding manned functions. However, it has now transformed into ‘unmanned-piloting’ capability, with a ground-based human mission commander, akin to the External/ Internal Pilot in a UAS, but with significantly greater onboard autonomy and data-processing capability. ALIAS aims to support execution of an entire mission from take-off to landing, with round-the-clock and all-weather capability, in ‘contested, congested and degraded visual environments’, including autonomous handling of contingencies such as aircraft system failures.
DARPA has set out three specific goals for ALIAS, which are:-
- Enhanced crew safety in inclement user/operational environments.
- Increasing mission effectiveness by obviating onboard pilot fatigue and taking over basic flying functions to allow external pilots to concentrate on mission planning and payload/armament packaging.
- Enhance cost-saving by reducing the requirement of trained crews.
While the ALIAS program does not truly represent Artificial Intelligence (AI) capabilities for rotary-wing platforms, the present level of technology features mission-decision parameters worked out by staff/pilots. ALISA then plans the flight parameters for the mission and consequently computes the most efficient way to execute the mission. This, without doubt, is a huge fillip for autonomous flying technology.
According to DARPA, the technological collaboration with Sikorsky (manufacturers of Black Hawk helicopters) is now mature enough to commence user trials with the US Defence Forces, with the express aim of identifying multiple operational environment profiles in which these Autonomous Helicopters (AH) can operate. This would flow into the US Defence Forces taking over the technology, with DARPA planning to wean away from the ALIAS Program later this year, in order to allow the Defence Forces to identify requirements and decide upon product improvement, based on specific operational imperatives.
Interestingly, a key factor in enabling the Black Hawk’s autonomous flight was computing power. According to statements from Sikorsky (LM), ‘back in the early 2000s, the supercomputer necessary to power the autonomous flight systems would have filled the entire Black Hawk cabin, and taken up its entire payload, but now is the size of a toaster’!
Airspace Management for UAM Operations
Confidence with respect to fully autonomous flight would need to preferably first be developed by UAM operations involving simple, uncomplicated flight paths defined by fixed routes before evolving to completely autonomous complex operations. It must be remembered that UAM operations are significantly different from UAS Traffic Management (UTM) operations, as the former involve operation of much larger, thus far manned platforms, required to operate upto their flight ceiling – a vital facet for survivability in conflict!
The NASA paper also stresses upon architectures for managing UAM operations in controlled/congested airspace. This would involve airspace structures akin to Visual Flight Rules (VFR) corridors dedicated for such operations. The paper opines that UAM operations may initially commence with VFR operations and graduate to Instrument Flight Rules (IFR) protocol, an essential pre-requisite for instrument-controlled autonomous flight.
There would, as mentioned earlier in the article, be a requirement to improve autonomous capability for undulating flight, graduating to obstacle avoidance and onto evasive flight measures in conflict. These could extend to both uninhabited or urban environments. Flight paths will have to be planned accordingly, with flight altitudes initially being restricted to below traditional VFR/ IFR corridors. This , however, directly conflicts with the survivability paradigm mentioned above and is further convoluted by high tempo of flight operations envisaged in operations. Apropos, the graduation to full-scale autonomy will have to be sequential and calibrated.
A realistic example quoted in the paper is a case involving emergency transport of medical personnel to a location and subsequent casualty evacuation. This scenario will necessarily involve non-standard or unpredicted situations of aircraft control and airspace management. The presence of a congested aerial environment adds further complexity and consequent requirement of capability to navigate/fly in such an environment. An additional challenge could involve integration with other planned operational flight paths without encroaching on the latter. The emphasis would therefore be on avoiding conflicting flight paths and creating a safe and well-defined UAM corridor, specific to the operational situation at hand.
As per an April 2021 paper by the Journal of Aerospace Computing, Information and Computation, the onboard instrumentation will need to cater for reactive obstacle avoidance guidance, landing site selection, pilot/autonomy interaction, and pilot situational awareness for degraded visual environments, among other facets.
Autonomous Operation on Fixed Wing Aircraft
Taking a cue from the US Army’s Black Hawk unmanned flight, the US Air Force (USAF) has expressed intent to use the ALIAS on its mainstay F-16 fighter jets. Similar interest has also been expressed by other countries like Japan.
Again, experiments on fighter jets for autonomous flight is not new. In 2017, the USAF collaborated with LM to develop autonomous capability on the F-16. The autonomous fighter jet was demonstrated to be capable of conducting air-to-air and ground-strike missions without human intervention- a significant development. However, the capability of terrain hugging flight operations in a contested environment was yet to be achieved, which is sure to once again come into focus after the Black Hawk unmanned flight. What needs to be kept in mind, however, is the impetus already gained by MUMT, wherein a drone/drone swarm is controlled from a fighter jet for surveillance/ground-attack/air-to-air operations, thus providing the desired flexibility as also the opportunity for safe stand-off operations by expensive fixed-wing platforms. Fully-autonomous flight for fighter jets involving supersonic speeds and consequent split-second flight control changes, coupled with the strain of high-G aerodynamic forces, would still be a focus of debate.
Conclusion
In today’s high-intensity conflict environments, infested with hostile aerial platforms and lethal Air Defence systems, achievement of autonomous flight technology for existing manned aerial platforms was an obvious milestone. This would serve to significantly cut costs of combat-pilot training and obviate loss of life, while allowing the platform to carry out all envisaged operations. Caution has to however be exercised in the fact that contested aerial environments are unpredictable, nebulous and vague, and autonomous technology must be cautiously fielded, with repeated iterations in the field, to cover all possible contingencies.

Disclaimer
The opinions expressed in this article are the author’s own and do not reflect the views of Chanakya Forum. All information provided in this article including timeliness, completeness, accuracy, suitability or validity of information referenced therein, is the sole responsibility of the author. www.chanakyaforum.com does not assume any responsibility for the same.
Chanakya Forum is now on . Click here to join our channel (@ChanakyaForum) and stay updated with the latest headlines and articles.
Important
We work round the clock to bring you the finest articles and updates from around the world. There is a team that works tirelessly to ensure that you have a seamless reading experience. But all this costs money. Please support us so that we keep doing what we do best. Happy Reading
Support Us Or


9289230333
Or














POST COMMENTS (0)